RAG 在检索时,会在向量数据库中找出与查询向量 P 最相近的 k 个文档向量,如何从海量向量中找出与 P 最相近 k 个向量呢,这是一个 K 近邻问题( K-Nearest Neighbors,KNN)
本文介绍下问题 KNN 的两种方法
KNN 暴力的方法,可以计算查询点与数据集中每个点的距离,然后全部放入大顶堆中,返回 k 个点,时间复杂度是 O(d * nlogn),n 是节点个数,d 是维度,当 n 很大时,这种方法会非常耗时
下面介绍两种不需要遍历所有数据的方法
KD-Tree
K-Dimensional Tree,是一种用于组织 k 维空间数据的数据结构,主要用于范围搜索和最近邻搜索
核心思想
递归地对 k 维空间进行划分,将空间划分为若干个小区域
数据结构
二叉树,每个节点保存一个数据和划分维度
构建过程
开始时的 KD-Tree 是空树,递归地向 KD-Tree 上添加子节点,包含以下步骤:
选择划分维度(split_dim):当前节点应该基于哪个维度划分,常用有两种方法:
循环选择:从根节点(深度为0)开始,第 depth 层的节点使用第 (depth % k) 维度来划分,k 为总维度数
优点:实现简单,计算开销小
缺点:如果数据在某个维度上方差很小,轮流划分可能不会产生最有效的分割
最大方差法:在每个节点,计算当前数据集(分配到该节点为根节点子树的数据)在所有 k 个维度上的方差,选择方差最大的维度划分
思路:方差越大,说明数据越分散,更有效的划分数据集
优点:通常来说可以生成搜索性能更好的树
缺点:构建过程计算开销大
选择划分值(split_value):在选定的维度下,用什么值来划分,希望划分后两边数据量相差不大,否则会不平衡,最常用的是用中位数
创建节点:在 KD-Tree 上新建节点,节点的值是 split_value 所在的数据
划分:根据split_dim 和 split_value,将数据划分为左右两个子集
向下递归:递归构建左右子树
左子树的数据在 split_dim 上的值一定小于 split_value,右子树的数据在 split_dim 上的值一定大于等于 split_value
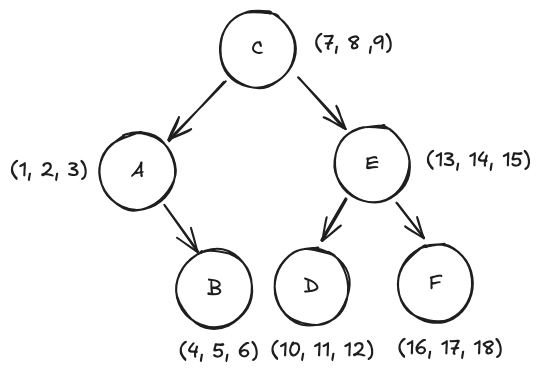
举例说明:k=3, n = 6
数据集:A(1, 2, 3), B(4, 5, 6), C(7, 8 ,9), D(10, 11, 12), E(13, 14, 15), F(16, 17, 18)
构建过程:
- depth = 0
- 选择维度:0 % 3 = 0
- 当前数据集:A, B, C, D, E, F
- 选择划分值:第 0 维数据=[1, 4, 7, 10, 13, 16],划分值取中位数 7
- 创建节点:划分值对应数据 C(7, 8 ,9) 作为根节点
- 划分子树:
- 左子树(第 0 维 < 7):A(1, 2, 3), B(4, 5, 6)
- 右子树(第 0 维 >= 7):D(10, 11, 12), E(13, 14, 15), F(16, 17, 18)
- depth = 1 左子树
- 选择维度:1 % 3 = 1
- 当前数据集:A, B
- 选择划分值:第 1 维数据=[2, 5],划分值取中位数 2
- 创建节点:划分值对应数据 A(1, 2, 3) 创建节点
- 划分子树:
- 左子树:空
- 右子树:B(4, 5, 6)
- depth = 1 右子树
- 选择维度:1 % 3 = 1
- 当前数据集:D, E, F
- 选择划分值:第 1 维数据=[11, 14, 17],划分值取中位数 14
- 创建节点:划分值对应数据 E(13, 14, 15) 创建节点
- 划分子树:
- 左子树:D(10, 11, 12)
- 右子树:F(16, 17, 18)
当前节点包含的数据只有1个时,递归结束,该节点作为叶子节点
最终的 KD-Tree 为
搜索过程
下面介绍 DK-Tree 的两个常见的应用场景:范围搜索 和 KNN
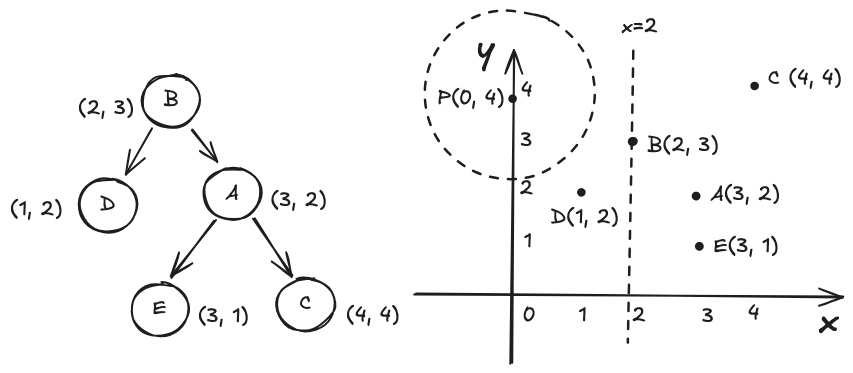
DK-Tree 的范围搜索
假设搜索范围为 [min0, max0] * [min1, max1] * ... * [mink, maxk]
搜索过程从根节点开始,递归进行以下判断:
- 如果当前节点 P 在范围内,将 P 加入到结果集中
- 决定递归搜索哪个子树:
- 确定 P 的划分维度 d,P 在 d 维度的值为 x
- 如果 x <= minp,说明左子树所有节点的 d 维度值都小于 minp,左子树可以剪枝,否则遍历左子树
- 如果 x > maxp,说明右子树所有节点的 d 维度值都大于 maxp,右子树可以剪枝,否则遍历右子树
- 递归终止条件:当前节点为空
DK-Tree 的 KNN 搜索
暴力的 knn 是遍历整颗树,计算每个节点与目标点 P 的距离,找到距离最小的 n 个节点。可以利用 KD-Tree 的特性来剪枝提高遍历效率
假设当前已经遍历了 n 个节点,最大距离是 dmax,如果子树中所有节点到 P 的最小距离大于 dmax,则可以直接跳过该子树;但是最小距离还是要遍历整颗子树才能得到,转为计算 P 到子树的超平面距离的方式
子树的超平面:由子树跟节点的 split_dim 和 split_value 定义的无限平面
在 DK-Tree 中,每个节点可以看做对当前数据集在 split_dim 维度用 split_value 分割成两部分,split_dim 与 split_value 就构成了一个超平面,左子树的数据都在超平面的一侧,右子树的数据都在超平面的另一侧
设 P 到超平面的距离为 dist
核心思想:以 P 为中心,半径 dmax 为半径的超圆面,如果超圆面与超平面没有交集,则对超平面另一侧剪枝,具体为:
- 如果 dmax < dist,另一侧整个空间都不存在更近的点,可以剪枝
- 如果 dmax >= dist,另一侧可能存在更近的点,不可剪枝
我们将整个过程分为几个阶段,假设 K=1(最近邻),可以轻松的推广到 K > 1
阶段一:确定初始节点
找到目标点 P 较近的点,得到较小的初始距离作为比较基准,有利于剪枝
- 从根节点开始,比较 P[split_dim] 与 split_value 大小
- 如果 P[split_dim] < node.split_value,进入左子树,否则进入右子树;
- 直到叶子节点 D,计算 min_dist = dist(P, D)
阶段二:回溯父节点
假设 N 的左子节点是 P,右子节点是 R
- 回溯到父节点 N,计算 dist(P, N),如果 dist(P, N) < min_dist,则 N 为最近邻,更新 min_dist
- 计算 P 到 N 的划分超平面的距离 d,如果 d > min_dist,另一侧不可能存在更近邻的点,跳过整个另一侧子树;如果 d <= min_dist,可能存在更近的点,继续检索
阶段三:检索另一侧子树
另一侧子树的根节点为 R
- 从 R 开始,递归执行阶段一、二、三
- 递归结束条件:回溯到 R
- 递归调用完成后,会带着子树中找到的最佳结果返回
阶段四:继续向上回溯
完成了对子树 N 所有数据的检查后,继续向上回溯 N 的父节点,重复上述阶段,直到回溯到整个树的根节点
在最近邻(K=1)问题中,超球面半径是 min_dist,当 K > 1 时,替换成大顶堆堆顶值即可
优缺点
优点:
- 低维空间查询高效:对于低维数据(通常 k < 10~20),性能远高于暴力线性扫描,时间复杂度可接近O(logn)
- 实现简单
- 内存开销小
- 适用于精确查询
缺点:
- 维度灾难:当数据维度 k 较高时,KD-Tree 的性能会急剧下降,甚至退化为近似线性扫描(原因:高维度空间,以查询点为圆心的超球面更大概率与划分超平面相交,剪枝效率大大降低)
- 对数据分布敏感:当某个维度的数据分布不均,可能导致分割后两边数据量差异很大,会出现很不平衡的树
- 不适合动态数据集:如果数据要频繁变更,维护树的平衡性的代价会非常高昂
- 不适合非欧式空间:KD-Tree 严重依赖于欧几里得空间的坐标轴,对于其他距离度量(如余弦距离)无法适用
为了解决 KD-Tree 在高维空间下效率问题,下面介绍一下 Ball-Tree
Ball-Tree
Ball-Tree 是一种专门解决 KD-Tree 在高维空间中性能退化问题而设计的空间索引数据结构
核心思想
用一系列层层嵌套的「超球面」来划分数据,利用点到球面的几何距离,在搜索中跳过不可能包含结果的区域
数据结构
二叉树,非叶子节点保存球心和半径,叶子节点保存球心、半径和若干数据
构建过程
Ball-Tree 的每个节点代表一个超球面,包含了该节点下所有数据
根节点的超球面包含了全部数据
叶子节点容量 s:叶子节点的数据量不超过 s
如果节点数据超过 s,要拆成两个不相交的子集,分配到子节点上
从根节点开始向下构建
为当前节点 N 创建球体
输入:当前数据集合 G
计算球心:计算 G 中所有节点的质心(各维度坐标的均值)
计算半径:计算球心到 G 中所有点的最远距离
分裂节点
如果 N 的数据量大于叶子节点容量,需要分裂成两个子集,并希望两个子集尽可能远离,以下是一种常用策略:最远点法
- 从 G 中随机选择一个点 p1
- 在 G 中找离 p1 最远的点 p2
- 将 P 划分到两个集合中:比较 P 中所有点到 p1、p2 的距离,离 p1 更近的点作为左子集PL(包括p1),离 p2 更近的点作为右子集 PR(包括p2)
递归构建
- 使用 PL 递归地构建 N 的左子树
- 使用 PR 递归地构建 N 的右子树
- 结束条件:当前节点的数据数量小于等于叶子节点容量
搜索过程
先以 K = 1 (最近邻)为例,再推广到 K > 1(KNN)
思路:
- 目标点 P,假设当前最近邻节点到 P 距离是 min_dist,如果 P 到超球面的距离 > min_dist,则超球面不会有更近邻的点
- 遍历所有节点,利用上述条件,判断是否剪枝
- 优先遍历距离更近的节点,得到更小的基准,提高剪枝概率
点 P 到节点 N(超球面球心为 O,半径为 r)的距离: \[ dist(P, N) = max(0, dist(P, O) - r) \] 如果 P 在超球面内,dist(P, N) = 0,如果 P 在超球面外,dist(P, N) > 0
搜索过程如下(从根节点开始,递归进行):
- 使用一个优先队列(最小堆)维护节点的访问顺序(先访问距离近的节点球面),初始最短距离 best_dist = ∞,最近邻点 nearest_neighbor = null
- 从根节点开始,将根节点放入优先队列
- 从优先队列取出节点
- 如果该节点是非叶子节点,检查它的两个子节点:
- 对于每个子节点 C,计算 dist(P, C)
- 剪枝:如果 dist(P, C) < best_dist,说明该子节点可能存在更近的点,将子节点 C 加入优先队列;否则,跳过整个子树
- 如果
- 如果该节点是叶子节点,遍历叶子节点内的每个数据点,计算每个点到 P 的距离,如果存在更小距离,更新 best_dist、nearest_neighbor
- 如果该节点是非叶子节点,检查它的两个子节点:
- 终止与返回:当优先队列为空时,此时 nearest_neighbor 即为最近邻
对于 K > 1,只需将 best_dist 和 nearest_neighbor 替换为一个能容纳 K 个候选点的最大堆,best_dist 为堆顶数据点的距离
优缺点
优点:
- 高维度搜索性能高:相同数据集,超球面比轴对齐的超平面的几何空间更小,更容易不相交,提高剪枝概率
- 对数据分布不敏感:Ball-Tree 不依赖于坐标轴划分,即使某个维度数据分布不均,不会影响平衡
- 支持任意距离度量:不仅使用欧式距离,还适用余弦相似度等距离
- 结果精确
缺点:
- 构建成本高
- 内存开销大:每个节点存储球心和半径
- 动态更新困难:数据集插入或删除后,重新计算受影响的球心和半径并保持树平衡的成本很高
KD-Tree 与 Ball-Tree 的比较
| KD-Tree | Ball-Tree | |
|---|---|---|
| 构建速度 | 更快 | 较慢 |
| 低维数据 | 更快 | 较慢 |
| 高维数据 | 差,易退化 | 远优于 KD-Tree |
| 内存开销 | 较低 | 较高 |
| 数据分布 | 敏感 | 不敏感 |
| 距离衡量 | 仅欧式距离 | 任意度量 |
| 动态更新 | 成本大 | 成本大 |
| 结果精确 | 精确 | 精确 |
总结
本文介绍了两种精确 KNN 的方法:KD-Tree 和 Ball-Tree,核心思想都是将数据集划分为多个几何空间,通过空间距离进行剪枝,减少遍历数量;
这两种方法有一个共同问题:需要构建一颗静态二叉树,在数据量很大的情况下,构建成本高,数据变化维护难度大,随着二叉树高度增加,检索时间也受影响
有时我们更追求查询时间,不需要完全精确的结果,比如准确率大于 95% 就可以接受,在下一篇文章里将讨论这种近似最近邻的方法